Boston Dynamics’ Cheetah is undoubtedly the fastest robot on Earth. But which one is the second fastest robot in Earth? It’s the MIT Cheetah.
At the recent International Conference on Robotics and Automation, MIT showed of its Cheetah robot where it reached a top speed of 13.7 mph (22 km/h). To accomplish this speed, the robot needed electric motors over hydraulics, with a new “three phase permanent magnet synchronous motor” that provided the necessary torque.
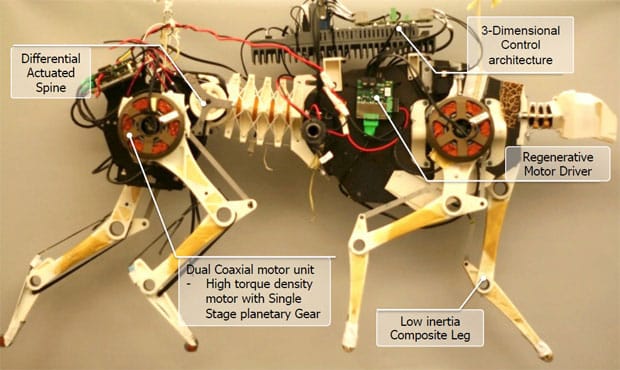
MIT team also used biometric principles to conserve energy and reduce stress on joints, including Kevlar tendons across the back of the legs. Here’s a video where you can see the MIT Cheetah hit its top speed while carrying 3-kg battery dummy weight.
The MIT team said, Cheetah’s cost of transport or COT (COT is the power consumption divided by weight times velocity) is around 0.52.
Source: MIT Biomimetics
Thanks To: Spectrum IEEE
[ttjad keyword=”camcorders”]

